La frenatura elettrica reostatica
la frenatura elettrica reostatica

Scopriamo i segreti del materiale di trazione e dei veicoli ferroviari
la frenatura elettrica reostatica
Motori a Corrente Continua
Macchine a corrente continua _La dinamo_

Analizziamo il particolare e, unico nel suo genere, sistema antislittante che hanno in dotazione le "tartarughe" Nel corridoio della locomotiva E 444R è ubicata una centralina antislittante "Parizzi" «AS»…
Coppia e velocità
In relazione al carico (corrente assorbita) le grandezze caratteristiche che definiscono il comportamento di un motore, sono due; La coppia motrice (C) e il numero di giri (n). La coppia è proporzionale alla corrente assorbita e al flusso di eccitazione. Il numero dei giri invece è proporzionale alla tensione di alimentazione e inversamente proporzionale all’eccitazione. Queste due cose sono molto importanti perché ci fanno capire le grandi possibilità che si hanno per variare la velocità del motore cioè il numero di giri; variando la tensione e il campo di eccitazione.
La forza controelettromotrice f.c.e.m.
A causa della legge dell’induzione elettromagnetica quando un conduttore in movimento taglia delle linee di flusso magnetico, esso diventa sede di una “tensione indotta” (E). Premesso questo facciamo delle considerazioni; è vero che il motore elettrico a causa della forza che si genera nelle spire dell’armatura è sottoposto ad una coppia che causa la sua rotazione (forza di Lorentz), ma è anche vero che mentre ruota, i conduttori delle matasse di armatura tagliano le linee del campo magnetico dell’avvolgimento di eccitazione; quindi sempre per la legge dell’induzione elettromagnetica, in queste spire si viene a generare una tensione, e dato che la tensione indotta, ha valore opposto alla causa che l’ha generata, tale tensione prende nome di forza controelettromotrice (-E). La forza controelettromotrice fa nascere nel motore una corrente di segno opposto a quella di trazione che, secondo la legge di Ohm, produce una caduta di tensione (Ri x I) sulla resistenza interna degli avvolgimenti del motore, quindi se vogliamo calcolare la tensione a cui è sottoposto un motore, ad un determinato numero di giri, dobbiamo tenere conto della f.c.e.m. perchè più il motore ruota veloce, più diventa alta la f.c.e.m. e come conseguenza diretta, avremo una diminuzione della coppia motrice a causa della diminuzione della corrente assorbita e quindi del flusso magnetico di eccitazione; facciamo un esempio pratico. Immaginiamo di salire su un E 656. Dopo aver ricevuto l’ordine di partenza andiamo in trazione. In questa situazione i motori essendo fermi, per la loro caratteristica di eccitazione in “serie” tenderebbero ad assorbire una corrente elevatissima ( partenza in corto circuito) con una fortissima coppia ed un flusso magnetico molto elevato, ma la presenza del reostato (è questo il suo scopo) sempre per la legge di Ohm, limita loro la corrente iniziale permettendo l’avviamento. L’amperometro motori in questa situazione segna una corrente I = V/R. ( reostato e resistenze interne dei motori stessi) Ora l’avviatore automatico comincia ad escludere le resistenze del reostato facendo assumere l’andamento della coppia motrice e della corrente, il classico andamento a “dente di sega” dovuto alle puntate di corrente che l’esclusione delle resistenze provocano. A reostato escluso notiamo che man mano che il treno acquista velocità, la corrente assorbita diminuisce; di conseguenza diminuisce anche la coppia e il flusso quale conseguenza della corrente. Questo fenomeno è dovuto alla f.c.e.m. che con la sua corrente, che aumenta mano mano va ad opporsi alla corrente di trazione ed alla tensione di alimentazione. Ora se il motore continuasse ad accelerare, la f.c.e.m. raggiungerebbe il valore della tensione di alimentazione che come sappiamo, nella combinazione di SERIE, è 3400/12 = 283 Volt verso massa a reostato escluso; a questo punto la corrente diventerebbe 0 e la coppia si annullerebbe, ma a causa degli attriti, del peso e della forza resistente in generale, questa situazione non è fisicamente possibile. Una volta che la coppia motrice ha raggiunto lo stesso valore della coppia resistente, si dice che il motore è in “equilibrio elettrodinamico” e termina l’accelerazione quindi fisicamente avremo che la tensione di alimentazione, è data dalla differenza trà la stessa tensione di alimentazione è la forza controelettromotrice V = V – f.c.e.m. Adesso se vogliamo raggiungere velocità più alte ci sono due modi; o cambiamo la tensione di alimentazione mediante le “combinazioni motori”, o variamo il flusso magnetico……andiamo a vedere.
L’indebolimento di campo (eccitazione)
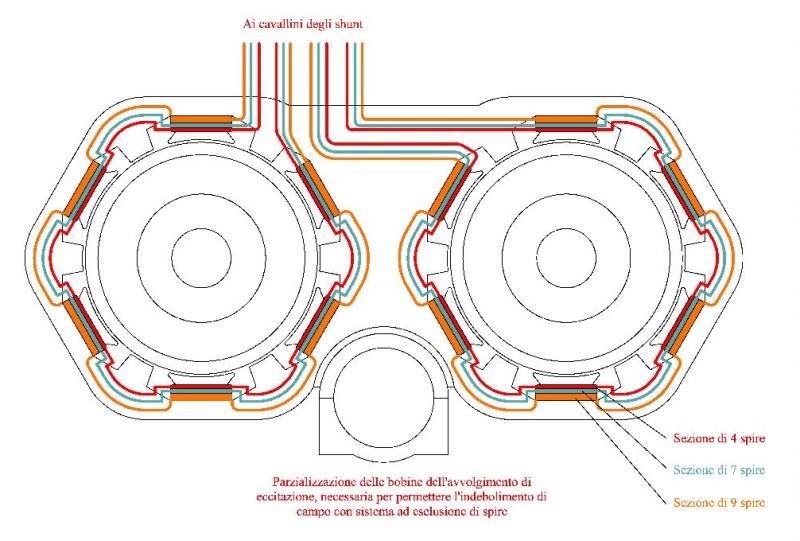
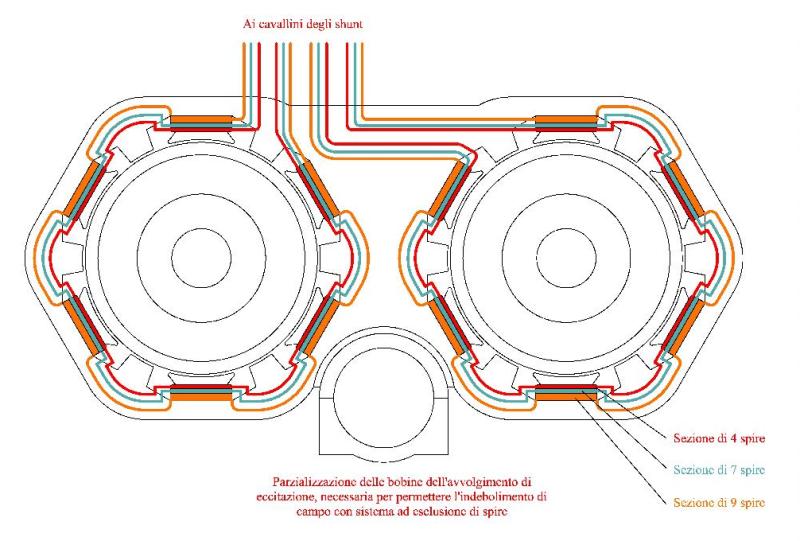
Riprendendo il discorso relativo alla regolazione della velocità, abbiamo detto che oltre alla tensione di alimentazione, per regolare la velocità dei motori possiamo agire sul campo, cioè sull’eccitazione. Per regolare il campo ci sono due modi; o si applica una resistenza in parallelo alle bobine di campo che deriva una certa corrente (shunt resistivo o Ohmico) oppure si ricorre alla parzializzazione del campo mediante l’esclusione di spire. Quest’ultimo nel tempo è stato preferito allo shunt ohmico per il minor spreco di energia; per contro presenta delle complicazioni maggiori nella costruzione del motore a causa delle matasse dell’avvolgimento di eccitazione che devono avere le spire divise in sezioni, che andranno collegate con un apposito combinatore che permette di ripartire l’indebolimento di campo su più gradini, variando la combinazione di spire. Escludendo parte del campo, si varia il rapporto Ampere/Spire quindi secondo la legge di Hopkinson diminuisce la forza magnetomotrice negli avvolgimenti di campo, di conseguenza diminuisce il valore della f.c.e.m. La corrente in questa situazione aumenta quindi il motore si trova nella condizione di riportare l’equilibrio tra V e f.c.e.m., quindi accelera ma a coppia inferiore in quanto i motori a campo indebolito, sviluppano una coppia minore di quelli che lavorano a campo pieno perché è minore il flusso magnetico che genera la coppia motrice. Ogni gradino di indebolimento, modifica la caratteristica di utilizzazione del motore permettendo una nuova velocità economica di marcia.
Nello schema che segue, ho elaborato al CAD un motore 82 400 di una locomotiva E 656, ma il principio vale per tutte le locomotive dotate di indebolimento di campo mediante esclusione di spire.
Gli “shunt” oltre ad aumentare l’elasticità di utilizzo dei motori permettendo di ottenere più velocità secondo i vari gradini su cui è suddiviso l’indebolimento di campo, sono necessari in caso di treni pesanti per cercare di uniformare lo sforzo di trazione al fine di evitare strappi ai tenditori, quando si effettua una transizione. Quando si passa da una combinazione motori, ad una superiore (transizione diretta), avviene l’aumento della tensione sui rami motori; questo aumento di tensione che è proporzionale alla combinazione motori effettuata, genera un forte incremento di corrente che nella fase iniziale, viene limitato dal reostato. Questo incremento di corrente sara maggiore se la velocità a cui si effettua la transizione è inferiore a quella ottimale; ne consegue una fase reostatica più lunga con sollecitazioni inutili al reostato, ai cavi, ai contattori e ai motori. L’utilizzo dell’indebolimento di campo permette di “allungare” la curva caratteristica della combinazione motori in atto, facendola avvicinare a quella successiva in modo tale che la transizione, possa avvenire con una minore differenza di sforzo di trazione e di velocità, che si traducono in una maggiore dolcezza e regolarità di condotta. Quando non è possibile effettuare gli “shuntaggi” bisogna avere l’accortezza; anzi direi che è necessario “tirare” le combinazioni motori il più possibile in modo tale che, il passaggio alla combinazione superiore, possa avvenire nel modo più dolce possibile; ovviamente treno e linea permettendo.